If you are preparing for CBSE Class 12 Board Exam Term 1 which will be an objective type questions paper, then you need to practice multiple choice questions of Class 12 Physics Chapterwise. In this article of AKVTutorials, you will get MCQ Questions for Class 12 Physics Chapter 2 Electrostatics Potential and Capacitance with Answer Keys.
MCQ Questions for Class 12 Physics Chapter 2 Question No 1
A unit charge is taken from one point to another over an equipotential surface, then
Option A : Work is done on the charge
Option B : Work is done by the charge
Option C : Work on the charge is constant
Option D : No work is done
Show/Hide Answer
Option D : No work is done
MCQ Questions for Class 12 Physics Chapter 2 Question No 2:
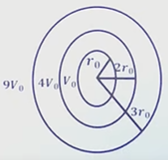
Equipotential surface are show in figure a and b, the field in
Figure a:
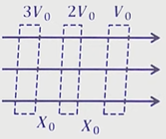
Figure b:
Option A : a is uniform only
Option B : b is uniform only
Option C : a and b is uniform
Option D : both are non uniform
Show/Hide Answer
Option A : a is uniform only
MCQ Questions for Class 12 Physics Chapter 2 Question No 3
When the separation between two charges is increased the electric potential energy of the charges
Option A : Increases
Option B : Decreases
Option C : Remains the same
Option D : May increase or decrease
Show/Hide Answer
Option D : May increase or decrease
MCQ Questions for Class 12 Physics Chapter 2 Question No 4:
Potential at the point of a pointed conductor is
Option A : Maximum
Option B : Same as at any other point
Option C : Zero
Option D : Minimum
Show/Hide Answer
Option B : Same as at any other point
MCQ Questions for Class 12 Physics Chapter 2 Question No 5:
If two conducting spheres are separately charged and then brought into contact
Option A : The total energy of the sphere is conserved
Option B : The total charge on the spheres is conserved
Option C : Both the total energy and charge are conserved
Option D : The final potential is always the mean of the original potential of the two spheres
Show/Hide Answer
Option B : The total charge on the spheres is conserved
MCQ Questions for Class 12 Physics Chapter 2 Question No 6:
On the perpendicular bisector of an electric dipole, the electric intensity E and potential V are,
Option A : E = 0, V = 0
Option B : E ≠ 0, V ≠ 0
Option C : E ≠0, V = 0
Option D : E ≠ 0, V ≠ 0
Show/Hide Answer
Option C : E ≠0, V = 0
MCQ Questions for Class 12 Physics Chapter 2 Question No 7:
When an electron approaches a proton, their electrostatic potential energy
Option A : Decreases
Option B : Increases
Option C : Remains unchanged
Option D : All the above
Show/Hide Answer
Option D : Decreases
MCQ Questions for Class 12 Physics Chapter 2 Question No 8:
If an earthed place is brought near positively charged plate, the potential and capacity plate
Option A : Increases, Decreases
Option B : Decreases, Increases
Option C : Decreases, Decreases
Option D : Increases, Increases
Show/Hide Answer
Option B : Decreases, Increases
MCQ Questions for Class 12 Physics Chapter 2 Question No 9:
An electron of mass m and charge e is accelerated from rest through a potential difference V in vacuum. Its final speed will be
Option A : √2ev / m
Option B : √ev / m
Option C : ev / 2m
Option D : ev / m
Show/Hide Answer
Option A : √2ev / m
MCQ Questions for Class 12 Physics Chapter 2 Question No 10:
Identify the correct order in which the gain in kinetic energies increases in the following cases
Ⅰ. Alpha particle accelerated through P.D of 2V
Ⅱ. Proton accelerated through a P.D of 2V
Ⅲ. Deutron accelerated through a P.D of 3V
Ⅳ. Electron accelerated through a P.D of 5V
Option A : Ⅱ, Ⅲ , Ⅰ and Ⅳ
Option B : Ⅲ, Ⅳ, Ⅰ and Ⅱ
Option C : Ⅳ, Ⅱ, Ⅰ and Ⅲ
Option D : Ⅰ, Ⅲ , Ⅱ and Ⅳ
Show/Hide Answer
Option A : Ⅱ, Ⅲ , Ⅰ and Ⅳ
| CBSE Class 12 Physics Chapterwise MCQ |
|---|
| 1 : Electric Charge & Fields MCQs | 1 to 10 | 11 to 20 |
| 2 : Electrostatics Potential and Capacitance MCQs | 1 to 10 | 11 to 20 |
| 3 : Current Electricity MCQs | 1 to 10 | 11 to 20 |
| 4 : Moving charges and Magnetism MCQs | 1 to 10 | 11 to 20 |
| 5 : Magnetism and Matter MCQs | 1 to 10 | 11 to 20 |
| 6 : Electromagnetic Induction MCQs | 1 to 10 | 11 to 20 |
| 7 : Alternating Current MCQs | 1 to 10 | 11 to 20 |
| 8 : Electromagnetic Waves MCQs | 1 to 10 | 11 to 20 |
| 9 : Ray Optics and Optical Instruments MCQs | 1 to 10 | 11 to 20 |
| 10 : Wave Optics MCQs | 1 to 10 | 11 to 20 |
| 11 : Dual Nature of Radiation MCQs | 1 to 10 | 11 to 20 |
| 12 : Atoms MCQs | 1 to 10 | 11 to 20 |
| 13 : Nuclei MCQs | 1 to 10 | 11 to 20 |
| 14 : Semi Conductor Electronics MCQs | 1 to 10 | 11 to 20 |
| 15 : Communication Systems MCQs | 1 to 10 | 11 to 20 |